

O método de aproximação poligonal de Feynman
📧
- U. Porto
Referência Tavares, J. N., (2026) O método de aproximação poligonal de Feynman, Rev. Ciência Elem., V14(1):006
DOI http://doi.org/10.24927/rce2026.006
Palavras-chave
Resumo
Este é o segundo de dois artigos sobre a relação entre as leis de Kepler e a lei de atração universal de Newton. O primeiro, com o título A Proposição XI dos Principia Mathematica de Newton1 foi publicado na edição de dezembro de 2024 da Revista de Ciência Elementar. Neste segundo artigo o objetivo é descrever como Feynamn resolve o chamado problema inverso relativo à força central, usando apenas argumentos de geometria elementar, detalhados no texto que a seguir se apresenta.
1. Os problemas direto e inverso.
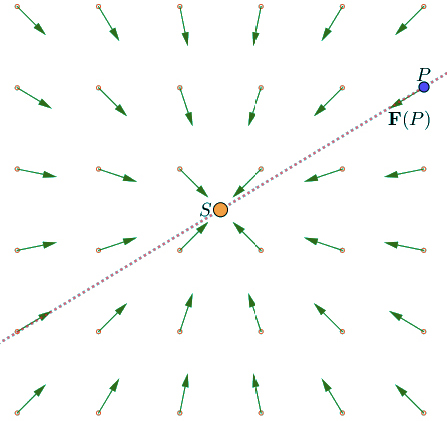
Para começar, suponhamos que temos um campo de forças central (ou radial) \(F\), isto é, em cada ponto \(P\) (o Planeta), \(F(P)\), a força aplicada numa partícula teste de massa 1, colocada em \(P\), tem a direção da reta que une \(P\) a um centro de forças fixo \(S\) (o Sol).
Neste contexto, podemos formular dois problemas, que queremos discutir e resolver – o Problema direto e o Problema inverso, definidos como segue:
- Problema direto… Dada uma determinada trajetória, \(t \rightarrowtail P (t)\), da partícula \(P\), e um centro de forças fixo, \(S\), determinar como é que a intensidade da força depende da distância \( \left | PS\right |\), entre \(P\) e \(S\):
\( F\left ( P \right )\underset{=}{?} \) função de \(|PS|\) (1)
onde \(|F(P)=\|F(P)\|\) é a intensidade da força \(F(P)\).
- Problema inverso… Conhecido o campo de forças central \(F\), de centro de forças fixo \(S\), determinar a trajetória, \(t\mapsto P(t)\), de um ponto \(P\) que se move sob a ação desse campo de forças.
Como vimos no primeiro artigo1, em 1687, Newton, na Proposição I dos Principia, usou a sua segunda lei: “força = massa × aceleração”, e um método de aproximação poligonal, para demonstrar a lei das áreas de Kepler, válida para qualquer força central, independentemente da sua intensidade! Por comodidade recordamos aqui essa proposição:
Proposição I dos Principia de Newton…
Seja um ponto fixo (o Sol) e \(P\) um ponto móvel (um planeta) sobre o qual, em cada instante, a única força, \(F(P)\), que nele atua é central, isto é, tem a direcção de \(P\) para \(S\). Então:
- a trajetória de \(P\) é plana.
- o vetor \(\overrightarrow{SP}\) varre áreas iguais em intervalos de tempo iguais (Lei das áreas de Kepler).
Já na Proposição XI dos Principia, que também aqui se recorda:
Proposição XI dos Principia de Newton…
Suponhamos que \(P\) se move numa elipse e que a aceleração de \(P\) é sempre radial, isto é, tem sempre a direcção de \(P\) para \(S\), onde \(S\) é um foco da elipse \(\varepsilon\).
Então a intensidade dessa aceleração, e portanto da força radial atrativa que atua em \(P\), é inversamente proporcional ao quadrado da distância entre \(P\) e \(S\):
\(F(P)\propto1/|SP|^2\)
Usando este resultado e novamente argumentos de aproximação, Newton criou um método geral para resolver o problema direto, isto é, um método geométrico que permite determinar a intensidade da força central responsável por um dado movimento orbital, em torno de um centro de forças fixo \(S\). Este método genial foi exposto no primeiro artigo publicado na RCE de dezembro de 20241.
Os exemplos ilustrativos deste método geral, incluídos na sua grande obra Philosophiae Naturalis Principia Mathematica, foram os seguintes:
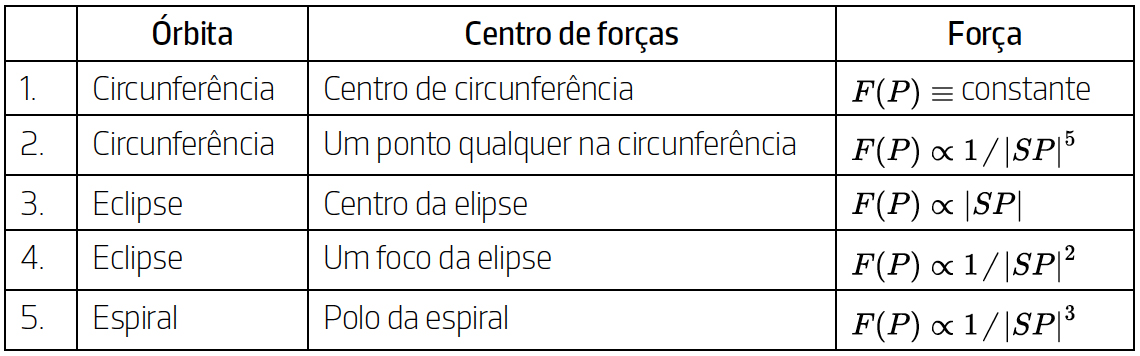
Onde o símbolo \(\propto\) significa “proporcional a”.
A linha 4, refere-se obviamente à lei de atração universal de Newton: “Se a órbita é uma elipse, e o centro de forças, \(S\), é um foco dessa elipse, então a intensiddae da força central é proporcional ao inverso do quadrado da distância de \(P\) a \(S{:}F(P)\propto1/|SP|^2\)”.
2. A aula esquecida de Feynman. A aproximação poligonal de Feynman.
Feynmann resolve, na sua Lost lecture3, o problema inverso relativo à força central
\(F(P)\propto\frac{1}{\left|SP\right|^2}\) (2)
Por outras palavras, sabendo que a intensidade do campo de forças central, é proporcional ao inverso do quadrado da distância do planeta ao Sol, ele prova a primeira lei de Kepler (lei das elipses) – “Esse planeta move-se sobre uma elipse, com o sol \(S\) num dos focos” – usando apenas argumentos de geometria elementar!
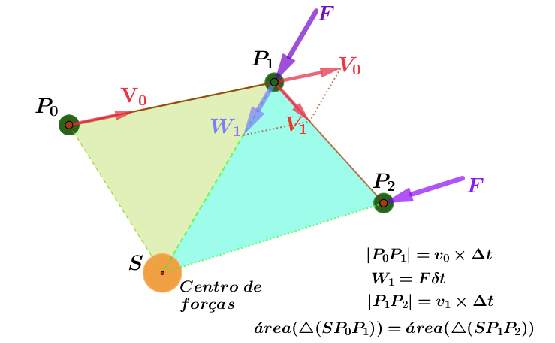
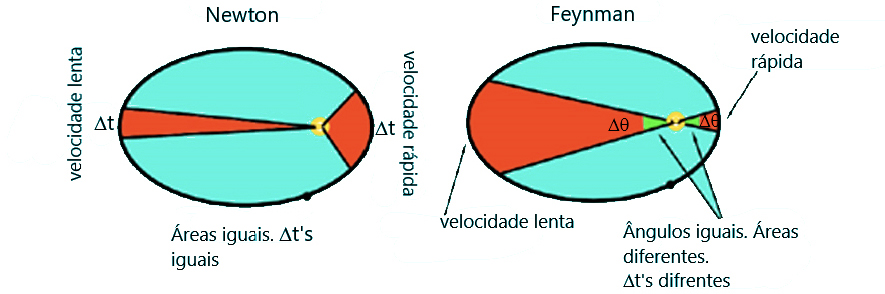
Como vimos, Newton considera uma aproximação poligonal da órbita, constituída por uma série de pontos separados por um mesmo intervalo de tempo \(\Delta t\). Em cada um desses pontos, a trajetória do planeta é desviada do movimento rectilíneo, por inércia, por uma força impulsiva que o “empurra” em direcção ao Sol (ver a FIGURA 51, que aqui se reproduz de novo: FIGURA 2).
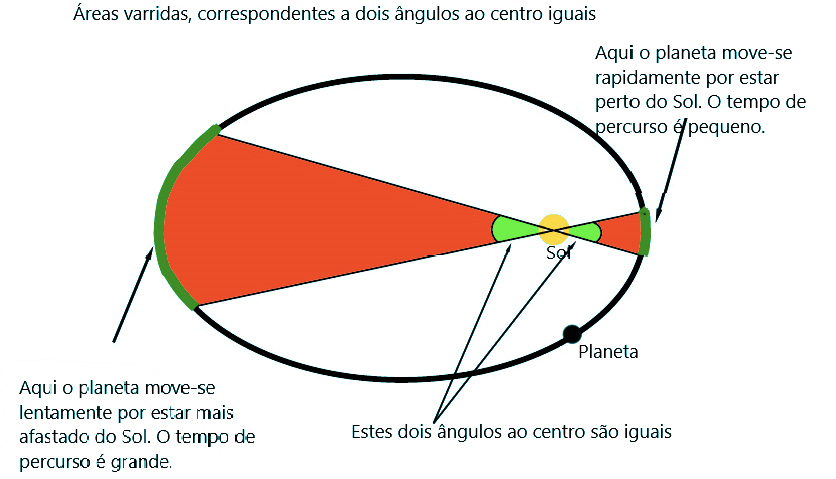
Por outro lado, Richard Feynman3 usa uma aproximação poligonal diferente: os vértices da poligonal, em vez de estarem separados por um mesmo intervalo de tempo \(\Delta t\), estão agora separados por um mesmo ângulo ao centro \(\Delta\theta\). Veja a FIGURA 3, onde se comparam as duas abordagens, respetivamente, de Newton e Feynman, e ainda a FIGURA 4.
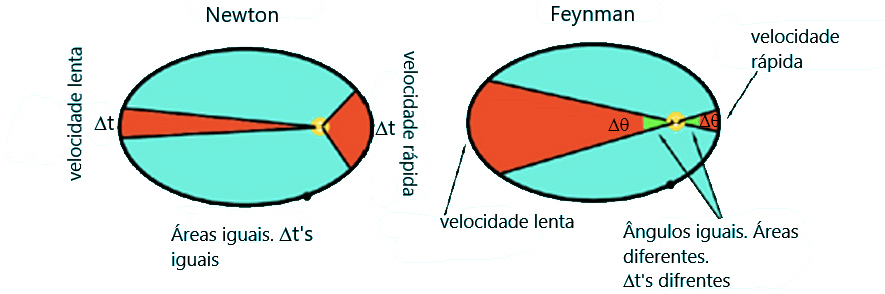
Na FIGURA 4 os dois segmentos têm um mesmo ângulo ao centro, mas delimitam áreas diferentes e, portanto, correspondem a tempos de percurso diferentes.
Analisemos agora a FIGURA 5. Do lado da órbita, mais próximo do Sol, o planeta vai de \(A\) para \(B\). Aí é desviado por \(\Delta v\) e continua de \(B\) para \(C\). Do outro lado da órbita, mais afastado do Sol, o planeta vai de \(D\) para \(E\) sofre um novo impulso \(\Delta v\), e segue de \(E\) para \(F\). Os percursos, \(AB\), \(DE\), e \(BC\), \(EF\), correspondem todos ao mesmo ângulo ao centro.
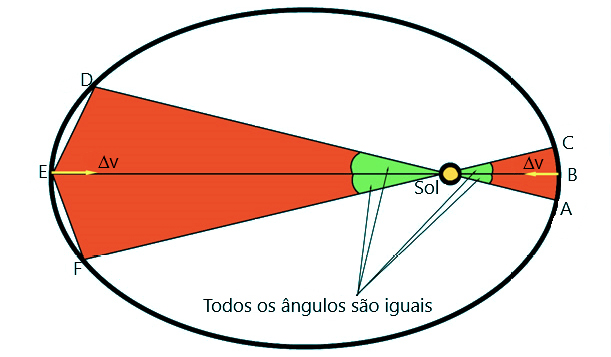
Sabemos que o planeta se move mais rapidamente ao longo de \(BC\) do que ao longo de \(EF\). De facto, de acordo com a lei das áreas, o planeta move-se mais rapidamente quando está mais perto do Sol do que quando está mais afastado.
Para saber quão mais rapidamente, temos que comparar as áreas dos triângulos \(\Delta (SBC)\) e \(\Delta (SEF)\), uma vez que os tempos são proporcionais às áreas (lei das áreas de Kepler).
Para isso, vamos ter que usar a fórmula (3):
\(\Delta A\propto R^2\Delta\theta\) (3)
onde \(R=|SP|\) é a distância de \(P\) a \(S\), e \(\theta\) é medido em radianos.
A prova é simples12. A FIGURA 6, ilustra o argumento:
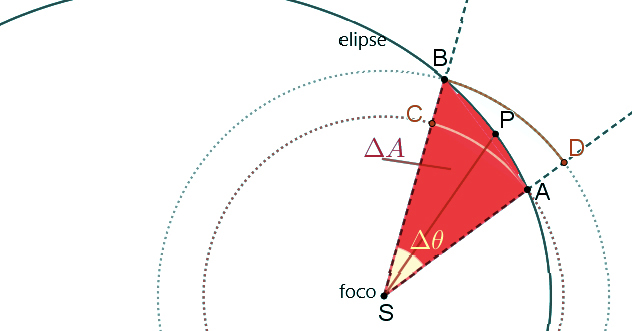
De facto, como se ilustra nessa FIGURA 6:
\(\frac{1}{2}|SA|^2\Delta\theta\leq\Delta A\leq\frac{1}{2}|SB|^2\Delta\theta\)
Quando \(\Delta\theta\approx0\), vemos (de uma forma intuitiva!) que \(\Delta A\approx\frac{1}{2}|SP|^2\Delta\theta=R^2\Delta\theta\), como se pretendia.
Vamos agora mostrar que a variação da velocidade é proporcional à variação do ângulo e tem sempre a direcção radial, determinada pelo vetor de posição.
1. Pela segunda lei de Newton, sabemos que:
\(F\propto a=\frac{\Delta v}{\Delta t}=\frac{\Delta v}{\Delta\theta}\frac{\Delta\theta}{\Delta t}\) (4)
2. Por outro lado, pela lei das áreas (Kepler): \(\Delta A\propto\Delta t\). Portanto obtemos:
\(\Delta t\propto\Delta A\propto R^2\Delta\theta\), atendendo a (3)
isto é:
\(\frac{\Delta\theta}{\Delta t}\propto\frac{1}{R^2}\) (5)
3. Recorde que estamos a resolver o problema direto, isto é, conhecemos a força central, e queremos saber qual a órbita de \(P\). A força central é a força da atração universal de Newton:
\(F(P)\propto\frac{\hat{r}}{\left|SP\right|^2}\) (6)
onde \(\hat{r}=\frac{\overrightarrow{SP}}{\left|\overrightarrow{SP}\right|}\) é um vetor unitário com a direcção do raio vetor \(\overrightarrow{SP}\).
4. Reunindo toda esta informação, temos então que, respetivamente, por (6), (4) e (5):
\(\frac{\hat{r}}{R^2}\propto F\propto\frac{\Delta v}{\Delta\theta}\frac{\Delta\theta}{\Delta t}\propto\frac{\Delta v}{\Delta\theta}\frac{1}{R^2}\)
o que implica que:
\(\frac{\Delta v}{\Delta\theta}\propto\hat{r}\)
ou ainda:
\(\Delta v\propto\hat{r}\Delta\theta\) (7)
que era o que se pretendia provar,isto é: a variação da velocidade é proporcional à variação do ângulo e tem sempre a direcção radial, determinada pelo vetor de posição.
Em particular, \(\Delta v\) não depende de \(R=|SP|\)!
Em todo o ponto da órbita, não importa quão distante ou quão perto de \(S\) esteja, o \(\Delta v\), correspondente a um dado ângulo \(\Delta t\), sempreomesmo.
Resumindo: \(\Delta v\) não depende de \(R=|SP|\), porque, como acabámos de ver, à medida que o planeta se afasta do Sol, a força que sobre ele atua fica cada vez mais fraca (diminui com o quadrado da distância), mas o tempo em que atua no planeta aumenta (com o quadrado da distância). O resultado é que todos os \(\Delta v\)’s são iguais.
Veja novamente as diferenças entre as abordagens de Newton e Feynman:
- Newton: os intervalos de tempo eram todos iguais e os \(\Delta v\)’s apontam todos para o Sol, mas os \(\Delta v\)’s são diferentes – os maiores \(\Delta v\)’s ocorrem quando o planeta está mais próximo do Sol.
- Feynman: os ângulos centrais são todo os mesmos e portanto os \(\Delta t\)’s são diferentes. Os \(\Delta v\)’s apontam todos para o Sol e são todos iguais, em módulo, ao longo de toda a órbita.
Este é o resultado principal de Feynman, que permite resolver o problema direto relativo à força de atração universal de Newton. Concretamente: permite reconstruir a aproximação poligonal da órbita, dados:
1. A posição inicial \(P_0\) do planeta,
2. A sua velocidade inicial \(v_0\), e ainda
3. O valor constante de \(\Delta v\).
De facto, como se pode ver na FIGURA 8:
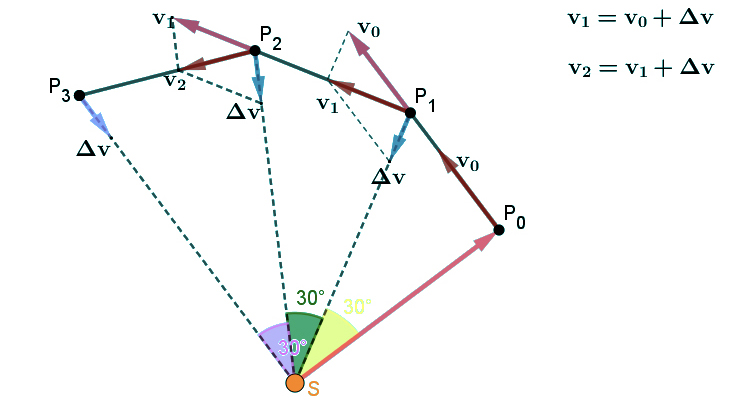
1. O planeta, partindo de \(P_0\), segue em linha recta com movimento uniforme com velocidade \(v_0\). Quando o raio vetor varre um ângulo ao centro de \(\Delta t\) (igual a 30°, por exemplo), o planeta atinge o ponto \(P_1\).
2. No ponto \(P_1\) o planeta sofre uma força impulsiva que muda a sua velocidade de \(\Delta_v\) no sentido radial. A nova velocidade \(v_1\) é calculada pela regra do paralelogramo \(v_1=v_0+\Delta v\).
3. O planeta, partindo de \(P_1\), segue com movimento rectilíneo uniforme com velocidade \(v_1\). Quando o raio vetor varre um ângulo ao centro de \(\Delta t\) (igual a 30°, por exemplo), o planeta atinge o ponto \(P_2\).
4. No ponto \(P_2\) o planeta sofre uma força impulsiva que muda a sua velocidade de \(\Delta v\) no sentido radial. A nova velocidade \(v_2\) é calculada pela regra do paralelogramo \(v_2=v_1+\Delta v\).
e assim sucessivamente.
3. Hodógrafo de Hamilton.
A reconstrução da órbita do planeta \(P\), pode conseguir-se com o recurso engenhoso a uma ideia criada por Hamilton. O chamado hodógrafo de Hamilton. Vejamos como.
Na FIGURA 9 temos:
- À esquerda, a trajetória poligonal determinada pelo método de Feynman, descrito na secção anterior,
- À direita, destacou-se, num diagrama separado, a sucessiva variação das velocidades. É a este diagrama de velocidades que se chama o hodógrafo de Hamilton4, que foi quem o inventou.
Como se assinala na figura da direita de FIGURA 9, como todos os lados (vermelhos) têm o mesmo comprimento, igual a \(\Delta v\), e como todos os ângulos externos são iguais a \(\Delta t\) (igual a 30°, por exemplo), o hodógrafo para o movimento de um planeta sob a ação de um campo de atração Newtoniano, é uma circunferência. O seu centro \(C\) em geral não coincide com a origem \(O\) do hodógrafo (FIGURA 9).
Se na figura da esquerda 9, dividirmos a trajetória em sectores que subentendem ângulos iguais \(\Delta t\), e supondo que 360/\(\Delta t\) = \(n\) inteiro, (por exemplo, se \(\Delta t\)= 30°, como nas figuras teriores), obtemos uma trajetória poligonal com vértices (se \(\Delta t\)= 30°, obtemos uma poligonal com 360/30 = 12 vértices). Na figura da esquerda 9, estão apenas representados 5 pontos \(P_0,\cdots,P_4\).
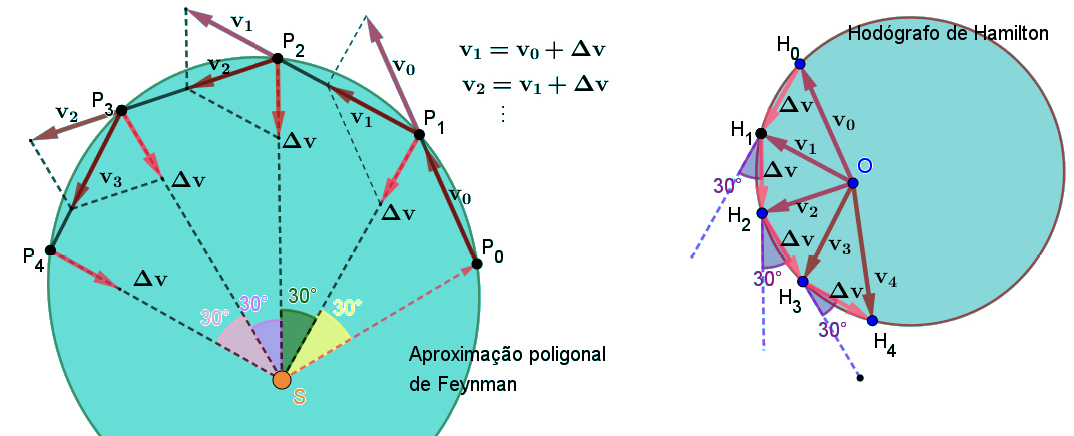
Já no Hodógrafo (figura da direita 9), no limite, quando \(\Delta0\to0\), o polígono \(H_0H_1H_2H_3\cdots\) torna-se uma circunferência \(C\) de raio \(K\). O centro dessa circunferência é o ponto de onde parte \(\hat{r}\). De facto, a “velocidade” do hodógrafo, tangente a \(C\), é a aceleração \(a\).
Hamilton inventou o hodógrafo como uma nova maneira de pensar uma trajetória: um ponto \(H_i\) do hodógrafo de centro \(O\), representa o vetor velocidade, \(v_i=\overrightarrow{OH_i}\), num certo instante. Portanto o hodógrafo representa a variação do vetor velocidade com o tempo – o arco de hodógrafo entre dois instantes infinitamente próximos é proporcional à aceleração. Por outras palavras, a “velocidade” do hodógrafo representa a aceleração do corpo.
4. Dado o hodógrafo e a sua origem \(O\), como determinar a trajetória?
Dada a trajetória é fácil construir o hodógrafo correspondente, como está bem claro na FIGURA 9. Fixamos arbitrariamente uma origem \(O\) e, para cada instante \(t\), desenhamos o vetor \(v(t)\), aplicado em \(O\), e que representa a velocidade do planeta nesse instante \(t\).
Reciprocamente, dado o hodógrafo e a sua origem \(O\), como determinar a trajetória?
O problema que surge agora, é que, embora saibamos, através do hodógrafo, a direcção e grandeza do vetor velocidade, não sabemos em que ponto do plano, pertencente à órbita, é que ele é tangente a essa órbita? Não sabemos pois onde o colocar!
Feynman resolve imaginativamente, embora só parcialmente, o problema rodando o hodógrafo de 90° graus, no sentido horário. O hodógrafo continua um círculo mas agora todos os raios do hodógrafo são perpendiculares às verdadeiras direcções das velocidades. Além disso, o ângulo ao centro \(\theta\) é o mesmo em ambos os diagramas (o de posições e o de velocidades).
Para obter a trajetória, Feynman desenha-a diretamente sobre o hodógrafo. A solução é de facto parcial, porque o tamanho da trajetória não fica determinado, embora a sua forma seja a correta.
Vejamos como (veja a FIGURA 10).
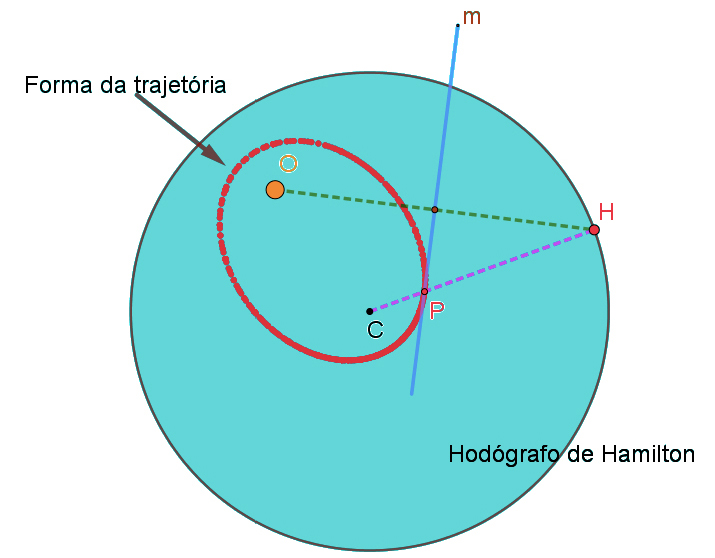
1. O hodógrafo é uma circunferência de centro \(C\), como sabemos, e com uma origem arbitrária \(O\), não coincidente com \(C\).
2. Considere-se um ponto \(H\) no hodógrafo.
3. Una-se \(H\) a \(O\) e considere-se a mediatriz \(m\) do segmento \(OH\).
4. Intersecte-se essa mediatriz com a recta \(CH\), que une \(H\) ao centro uma circunferência, para obter o ponto \(P\).
5. Quando \(H\) varia sobre o hodógrafo, \(P\) descreve uma elipse (ou uma hipérbole) cujos focos são \(O\) e \(C\). Além disso, a mediatriz \(m\) é tangente à elipse no ponto \(P\).
Referências
- 1 TAVARES, J. N., A Proposição XI dos Principia Mathematica de Newton, Revista de Ciência Elementar da Casa das Ciências. 2024.
- 2 KOWEN, M. & MATHUR, H., On Feynmann’s analysis of the geometry of Kepler, Am. J. Physics, 71 (4), 397-401. 2003.
- 3 GOODSTEIN, D. & GOODSTEIN, J., Feynman’s lost lecture, Vintage. 1997.
- 4 BRESSOUD, Second Year Calculus, Springer-Verlag. 1991.
- 5 BRESSOUD, D. M., Undergraduate Texts in Mathematics, Springer- Verlag. 1993.
- 6 BRACKENRIDGE, J. B., The Key to Newton’s Dynamics: The Kepler Problem and the Principia, University of California Press. 1996.
- 7 HAHN, A. J., Basic Calculus of Planetary Orbits and Interplanetary Flight: The Missions of the Voyagers, Cassini, and Juno, Springer-Verlag. 2021.
- 8 HERMAN, E., Passage to the limit in Proposition I, Book of Newton’s Principia, Hist. Math, 30, No.4, 432-440. 2003.
- 9 HERMAN, E., The instantaneous impulse construction as a formula for central force motion on an arbitrary plane curve with respet to an arbitrary force centre in the plane of that curve, Ann. Sci, 49, No.4, 369-375. 1992.
- 10 POURCIAU, B., Newton’s argument for Proposition 1 of the Principia, Arch. Hist. Exact Sci, 57, No.4, 267-311. 2003.
- 11 NAUENBERG, M., Kepler’s area law in the Principia: filling in some details in Newton’s proof of Proposition 1, Hist. Math, 30, No.4, 441- 456. 2003.
- 12 SWOKOWSKI, E., Calculus with Analytic Geometry, Brooks/Cole, Página 12. 1983.
Este artigo já foi visualizado 526 vezes.