

Polígono Funicular
📧 , 📧
- * IFMA/ NF/ U. Porto
- ɫ CF/ U. Minho | U. Porto
Referência Moreira, J., Gomes, C., (2026) Polígono Funicular, Rev. Ciência Elem., V14(1):007
DOI http://doi.org/10.24927/rce2026.007
Palavras-chave
Resumo
O polígono funicular é uma ferramenta gráfica útil para determinar o eixo central ao longo do qual o vetor resultante não nulo de um sistema de vetores desliza, e foi introduzida pelo matemático francês Pierre Varignon1.
Há formulações adicionais do polígono funicular, como por exemplo o polígono funicular dos momentos e o polígono funicular espacial2, 3. Iremos aqui seguir a formulação habitual nos livros de texto de Estática. Assim, a melhor forma de entender o método gráfico do polígono funicular é através de um exemplo concreto. Assim, consideremos um sistema de três vetores deslizantes no plano \(xOy\), os quais são aplicados a uma caixa bidimensional, como na FIGURA 1:
\(\overset{\rightarrow}{V_{1}} = \left(- 2, - 1\right) \textrm{ } , \\ \overset{\rightarrow}{V_{2}} = \left(- 2, - 3\right) \textrm{ } , \\ \overset{\rightarrow}{V_{3}} = \left(3, - 2\right) \textrm{ } ,\)
e escolhamos o sistema de coordenadas solidário com o centro da caixa (isto é, a origem deste sistema está centrada na caixa).
\(A_{1} = \left(- 5,2\right) \textrm{ } , \textrm{ } \\ A_{2} = \left(- 2, - 3\right) \\ A_{3} = \left(5, - 1\right) \textrm{ } . ,\)
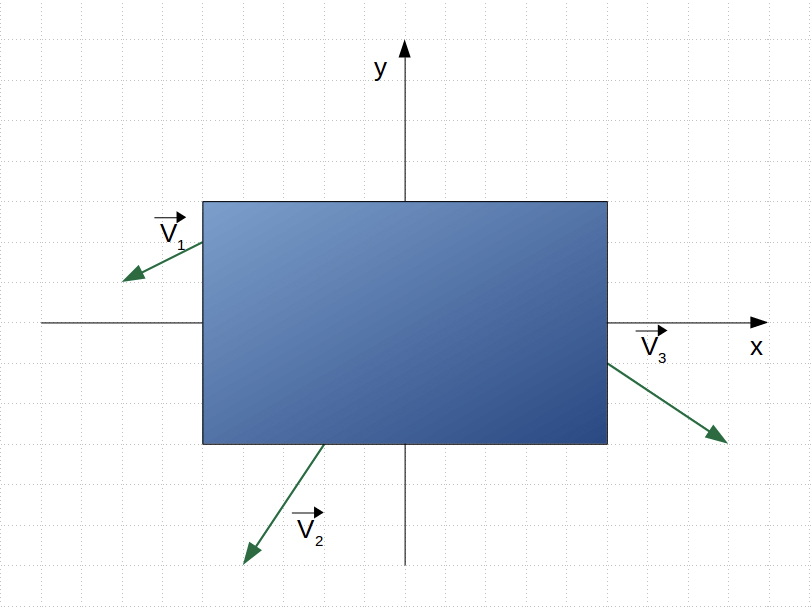
Deste modo, um dos pontos de cada uma das suas linhas de ação, que permitem a definição da equação vetorial da reta associada, podem ser escolhidos de modo que os vetores apareçam aplicados nas fronteiras da caixa, embora os seus efeitos físicos sejam iguais independentemente do ponto de aplicação ao longo das suas linhas suporte respetivas:
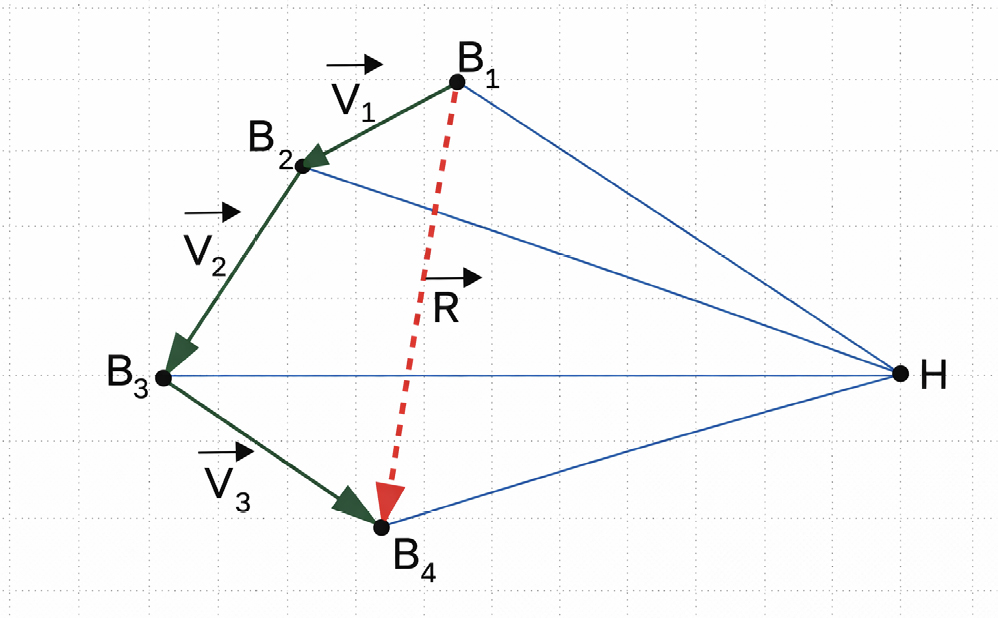
Agora, vamos construir uma figura auxiliar, o polígono de forças, começando com o vetor \(\overset{\rightarrow}{V_{1}}\), e colocando na sua extremidade final a extremidade inicial/origem do vetor \(\overset{\rightarrow}{V_{2}}\), e colocando na extremidade final deste a extremidade origem do vetor \(\overset{\rightarrow}{V_{3}}\). De seguida, desenhamos o vetor que é a soma vetorial do sistema, \(\overset{\rightarrow}{R} = \left(- 1, - 6\right)\). Escolhemos aleatoriamente um ponto do espaço, \(H\), e desenhamos as linhas que vão deste às extremidades da construção gráfica da FIGURA 2.
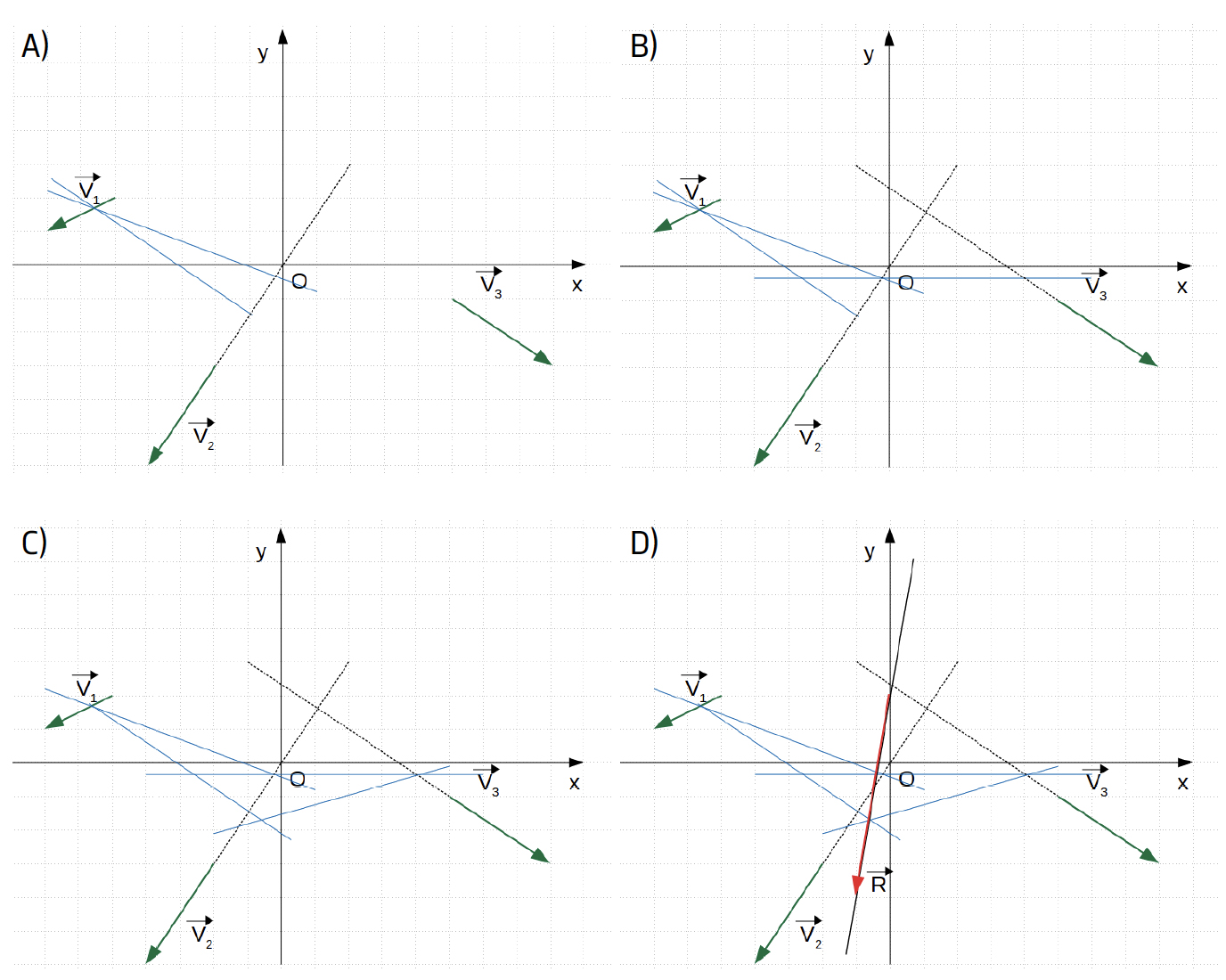
De modo a determinar o eixo central, ao longo do qual o vetor resultante desliza, desenhamos uma linha paralela ao segmento de reta \(\left[B_{1} , H\right]\) passando por um ponto da linha de ação de \(\overset{\rightarrow}{V_{1}}\), e uma linha paralela a \(\left[B_{2} , H\right]\) passando pelo mesmo ponto de modo que cruze a linha de ação de \(\overset{\rightarrow}{V_{2}}\), tal como na FIGURA 3 A). Neste ponto, desenhamos uma linha paralela a \(\left[B_{3} , H\right]\) até que intersete a linha de suporte do vetor \(\overset{\rightarrow}{V_{3}}\) tal como na FIGURA 3 B). Finalmente, desenhamos uma linha paralela a \(\left[B_{4} , H\right]\) até que esta intersete a linha paralela a \(\left[B_{1} , H\right]\) inicialmente traçada, como na FIGURA 3 C). Este ponto de interseção é um ponto do eixo central. Agora, colocamos a linha de ação do vetor resultante passando por este ponto e desenhamos o vetor principal ao longo do eixo central, tal como na FIGURA 3 D).
O polígono funicular é a construção geométrica da FIGURA 3 D). Adicionalmente, a linha funicular é a linha flexível e inextensível que se obteria ao fazer passar por um ponto da linha paralela a \(\left[B_{1} , H\right]\), que chamaremos \(T_1\), e terminar num ponto da linha paralela a \(\left[B_{4} , H\right]\), que chamaremos \(T_2\), tendo vértices em \(A_1\), \(A_2\) e \(A_3\).
Também podemos encontrar o eixo central por via analítica. O vetor momento relativamente à origem do eixo é dado por:
\(\overset{\rightarrow}{M_{O}} : = \sum_{i = 1}^{N} \overset{\rightarrow}{A_{i} - O} \times \overset{\rightarrow}{V_{i}} \textrm{ } ,\)
pelo que neste caso, fica:
\(\overset{\rightarrow}{M_{O}} = \begin{vmatrix} \overset{\rightarrow}{i} & \overset{\rightarrow}{j} & \overset{\rightarrow}{k} \\ - 5 & 2 & 0 \\ - 2 & - 1 & 0 \end{vmatrix} + \begin{vmatrix} \overset{\rightarrow}{i} & \overset{\rightarrow}{j} & \overset{\rightarrow}{k} \\ - 2 & - 3 & 0 \\ - 2 & - 3 & 0 \end{vmatrix} + \begin{vmatrix} \overset{\rightarrow}{i} & \overset{\rightarrow}{j} & \overset{\rightarrow}{k} \\ 5 & - 1 & 0 \\ 3 & - 2 & 0 \end{vmatrix} = \left(0,0 , 2\right) \textrm{ } .\)
O invariante escalar é obviamente nulo, \(I = \overset{\rightarrow}{R} \cdot \overset{\rightarrow}{M_{O}} = 0\), uma vez que o vetor resultante e o vetor momento são ortogonais entre si. Assim, a equação do eixo central é dada pela teoria dos vetores deslizantes:
\(\overset{\rightarrow}{M_{O}} + \overset{\rightarrow}{O - O^{'}} \times \overset{\rightarrow}{R} = \frac{I}{R^{2}} \textrm{ } \overset{\rightarrow}{R} \textrm{ } ,\)
pelo que neste sistema de três vetores fica:
\( \left ( 0,0,0 \right )=\left ( 0,0,2 \right )+\begin{vmatrix} \overrightarrow{i} & \overrightarrow{j} & \overrightarrow{k} \\ 0-x & 0-y & 0-z \\ -1 & -6 & 0 \\ \end{vmatrix}\Leftrightarrow \left\{\begin{matrix} z=0 \\ y=6x+2\end{matrix}\right.\)
É imediato verificar que esta linha é paralela ao vetor resultante e é a mesma determinada pelo método do polígono funicular. Notamos aqui que este método pode ser utilizado para situações muito mais complexas que a que foi explorada, e em alguns casos ser mais simples que o método analítico.
Referências
- 1 VARIGNON, P., Nouvelle mecanique ou statique: dont le projet fut donné en MDCLXXXVII, (Vol. 2). chez Claude Jombert. 1725.
- 2 MARKOU, A. A. & RUAN, G., Graphic statics: projective funicular polygon, Structures, 41, 1390-1396. 2022.
- 3 CIBLAC, T., Space funicular polygons and their applications by Émile Foulon. History of Construction Cultures, Seventh International Congress on Construction History, Lisbon (Online Event), Portugal. pp.263-270. 2021.
Este artigo já foi visualizado 552 vezes.