

A respeito de falhas...
📧
- Departamento de Geologia, Faculdade de Ciências, Universidade de Lisboa
Referência Fonseca, P., (2019) A respeito de falhas..., Rev. Ciência Elem., V7(3):047
DOI http://doi.org/10.24927/rce2019.047
Palavras-chave Geologia; Estrutural; Classificação; Falhas; Normal; Inversa; Tensão
Resumo
Geradoras de sismos, as falhas são um dos elementos mais importantes das movimentações que se verificam à superfície da Terra. Na grande maioria das vezes reportamo-nos a estes movimentos como ocorrendo em regime frágil, i.e., rompem ou partem quando não suportam mais tensão acumulada. Nestes casos, a resposta do material é libertar toda a energia acumulada, movimentando-se a falha e gerando um terramoto. As falhas diferem das fraturas por possuírem movimentações relativas entre os blocos ou bordos da falha. As fraturas ou diaclases são apenas superfícies de anisotropia que separam dois blocos não ocorrendo movimentação entre estes.
Uma falha pode ser estruturada por 3 tipos distintos de classificação: a) quanto à geometria; b) quanto à cinemática; c) quanto à dinâmica. Se excluirmos desta aproximação a análise dinâmica, mais complexa e que integra outros postulados menos simples, vamos abordar em conjunto, nesta fase, a Geometria e a Cinemática.
Se refletirmos, desde já, um pouco, chegamos à conclusão que as superfícies de falha raramente são superfícies planas e contínuas por grandes extensões. As superfícies de falha são, assim, no geral superfícies curvas, com ondulados suaves ou mesmo muito acentuados. Quer com isto dizer que muitas vezes a geometria condiciona a cinemática de uma falha. No esquema 1 pode observar-se que nesta superfície de falha hipotética, e que apenas deseja demonstrar o que agora se escreve, uma falha (no seu estudo vertical), com a subida do bloco E em relação à descida relativa do bloco W, pode ser simultaneamente: falha normal, falha vertical com a subida do bloco E em relação ao bloco W, e falha cavalgante ou inversa. Esta classificação prende-se com os estudos simples e elementares que classificam as falhas quanto às suas geometrias e cinemáticas nestas 3 possibilidades enumeradas e representadas no esquema 2 (respetivamente da esquerda para a direita, normal, vertical e inversa).
Quanto às várias possibilidades nas componentes de movimentações horizontais faz-se apelo a um texto anteriormente editado, nesta revista, em que foi explicado numa representação muito simples “o Pancho”. É um boneco de traços simples que possui para além de um chapéu de abas largas e uns botins de borracha, a capacidade de se poder “colocar” em vários locais para se orientar quer em plantas, quer em perfis ou cortes.
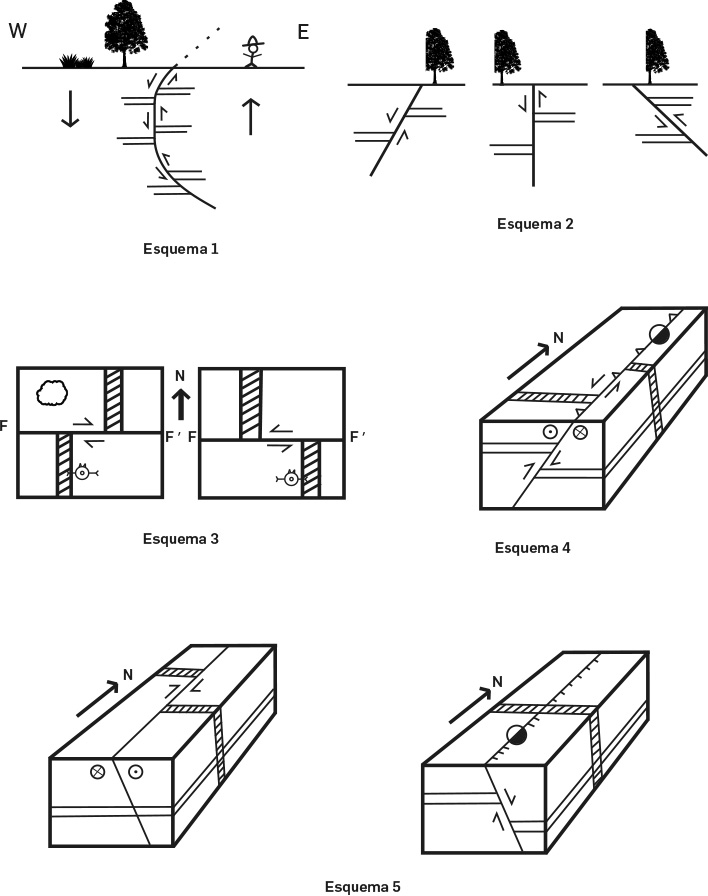
Deste modo, e para a utilização deste referencial nas componentes de movimentação horizontais, o Esquema 3 é ilustrativo dos tipos de desligamento direito e esquerdo (respetivamente), quando o bloco que se encontra em frente àquele onde se encontra o boneco se desloca respetivamente para a sua direita ou para a sua esquerda.
Resta nesta fase da explicação referir que do ponto de vista geométrico e cinemático existem os nossos referenciais (os marcadores cinemáticos, estruturas como as estratificações ou corpos filonianos) onde raramente vemos apenas uma das componentes – ou a horizontal ou a vertical –, sendo que na maioria das vezes o somatório da separação vertical e horizontal comporta uma componente oblíqua, como se pode observar no esquema 4, onde se regista uma falha cavalgante ou inversa para E, com um desligamento esquerdo associado.
Quando uma das componentes de movimento não ocorre diz-se que a componente que se observa é: um desligamento direito puro (quando não existe componente vertical associado) ou uma falha normal pura (quando não se regista movimentação horizontal) esquema 5.
A restante simbologia, para além das setas que indicam os sentidos de movimentação, é igualmente de simples representação: nas representações das movimentações horizontais, as circunferências com ponto indicam que o sentido do movimento vem de encontro a nós e as circunferências com x que se deslocam no sentido para longe de nós. A analogia encontrada é a das setas no lançamento das setas para um alvo – ou vemos a seta vir direita a nós, ou vemos a seta com as “penas” a afastar-se de nós.
Já na movimentação vertical é utilizada sempre uma circunferência que abarca os dois blocos da falha, pintando-se a negro o bloco que abate e ficando a branco o bloco subido. Acresce o desenhar um “pente” com os dentes no sentido da descida nas falhas normais, e uma sobrecarga de pequenos triângulos no bloco que cavalga sobre o bloco cavalgado nas falhas inversas.
BIBLIOGRAFIA
- 1 Allmendinger, R.W. et al. Notes on Fault Slip Analysis. Prepared for the Geological Society of America Short Course on“Quantitative Interpretation of Joints and Faults”. 1989
- 2 Burg, J.P. Strike-slip and oblique-slip tectonics, ETH. 2017
Este artigo já foi visualizado 6030 vezes.